|
||||
| ミオシンVIのステップ生成機構の解明 |
||||
| ミ
オシンVIは幅広い生物種に存在する事が知られているミオシンの1種です。ミオシンV等が主に物質を輸送するトランスポーターとして働くだけであるのに対
して、ミオシンVIはトランスポーターとして働くと同時に、膜構造などを細胞骨格であるアクチンフィラメントに繋ぎ止めるアンカーとしても働く事が知られ
ています。トランスポーターとして働く為には、ミオシンVIはアクチンフィラメント上を連続して運動する必要があります。一方で、アンカーとして働く為に
はアクチンフィラメント上の一定の箇所に留まり続ける必要があります。つまり、トランスポーターとアンカーとしての両方の機能を果たす為には、全く逆の性
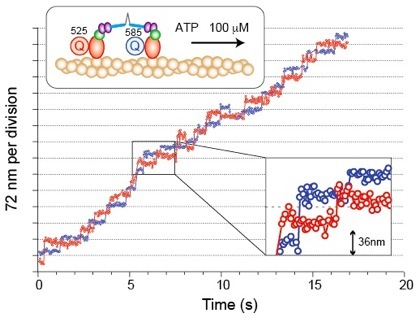
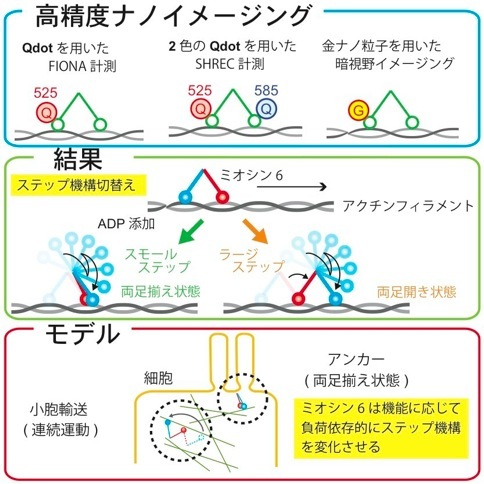
質が必要とされるのです。 私たちはどのようにしてミオシンVIがトランスポーターとしての働きと、アンカーとしての働きを両立しているのかを解明する為に、ミオシンVIの運動を 1分子レベルで詳細に調べています。計測技術として蛍光色素標識もしくはQdot標識を用いた全反射蛍光顕微鏡観察や、数十nmサイズの金コロイド標識を 用いた暗視野顕微鏡観察を用いる事で、マイクロ秒・数ナノメートルの精度で、ミオシンVIの動きの解析を行っています。 |
||||
|
||||
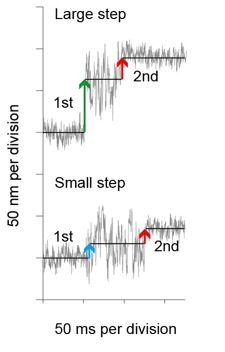
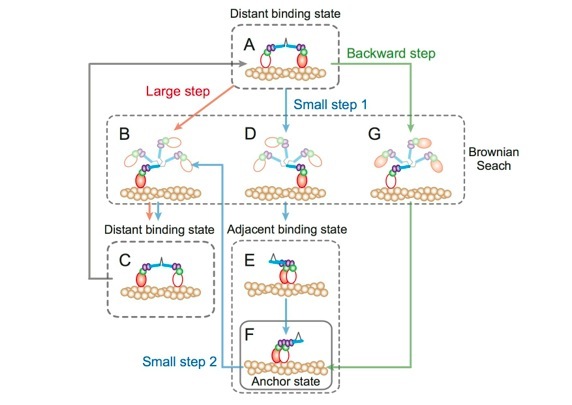
| 1分子計測の結果に基づき、私たちはミオシンVIの新たなステップモデルを提唱し
ています(下図)。私たちはミオシンVIに掛かる外部負荷依存的に、ミオシンVIは足閉じ状態(adjacent binding
state)を取り、人間が足を踏ん張るような状態でアンカーとして働き、ミオシンVIに負荷が掛かっていない時は、主に足開き状態(distant
binding state)を取り、トランスポーターとして働くと考えています。 現在はこれまでin vitro計測で提唱した負荷依存的なミオシンのVIの足開き状態と足閉じ状態のスウィッチング(トランスポーターとアンカーとしての機能のスウィッチン グ)が、実際に細胞内で起こっている事の実証を目指しています。また、ミオシンVIに特異的な足閉じ状態の生成を可能とするミオシンVIの構造的な基盤を 明らかにする事を目指しています。 |
||||
 |
||||
|
ミオシンVIのモデル
|
||||
 より詳細なミオシンVIのステップ生成モデル
|
||||
|
|
||||